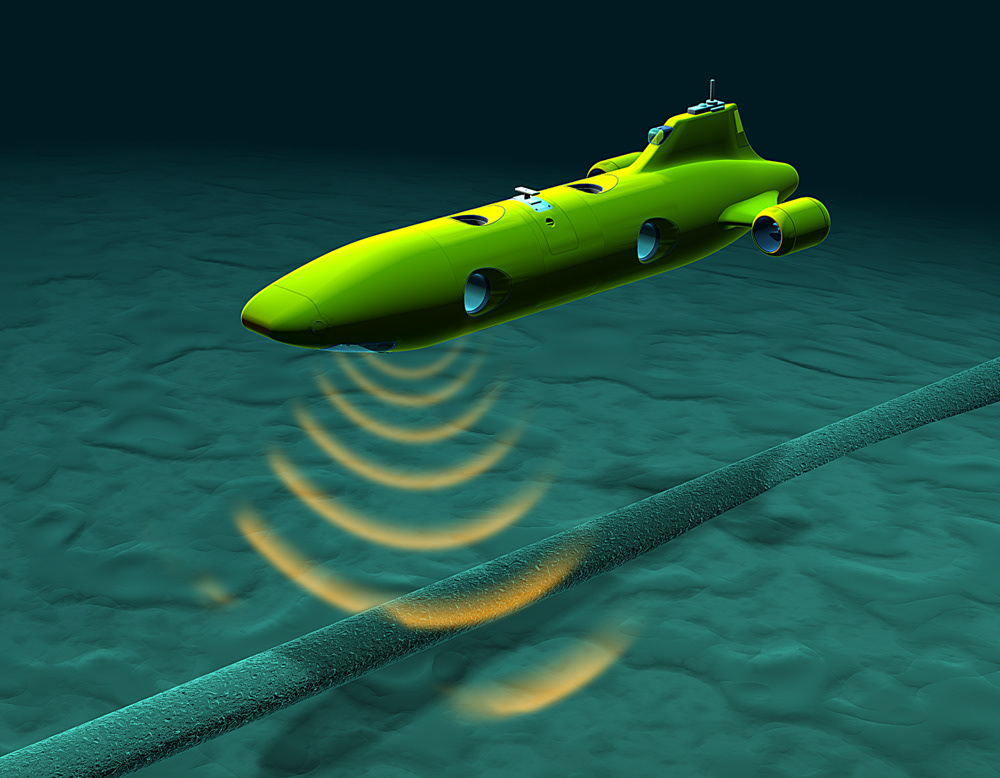
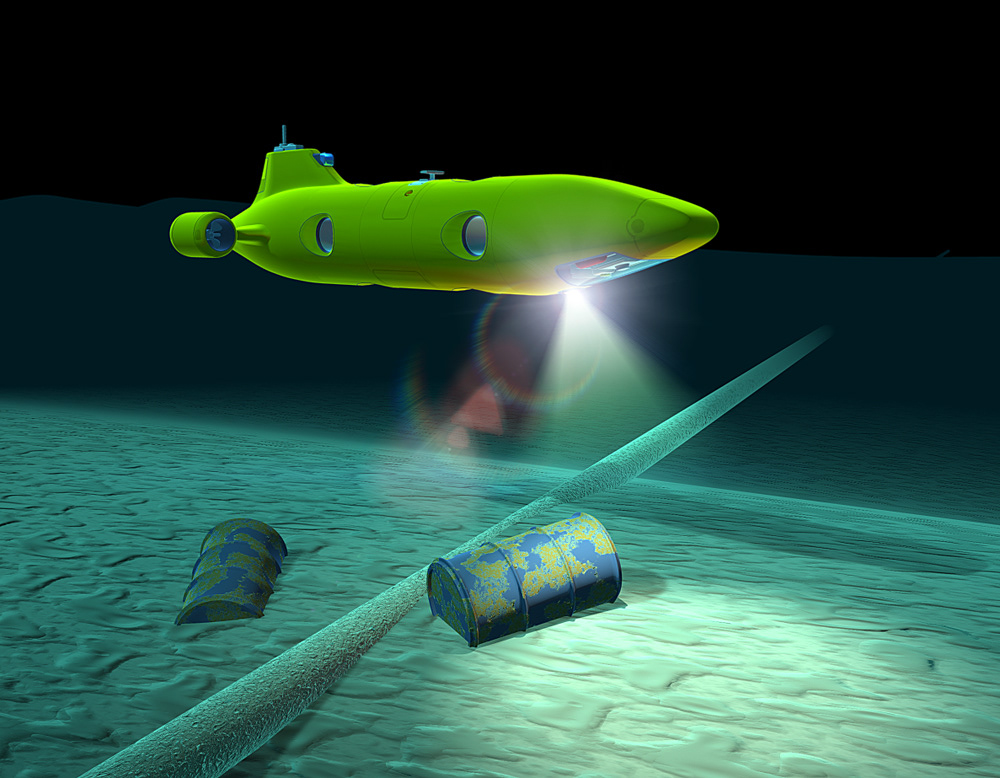
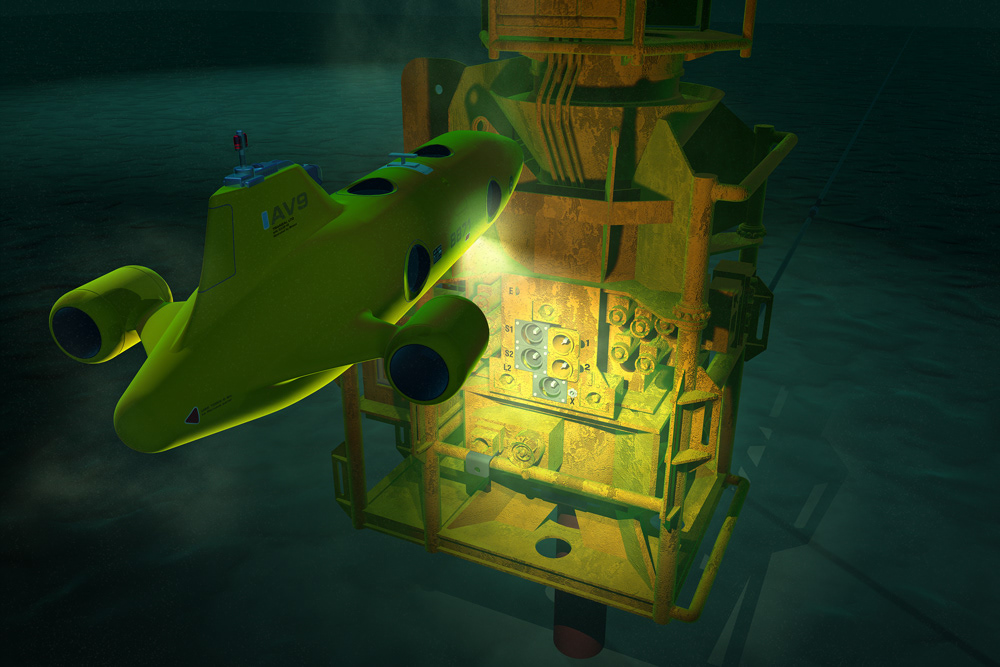
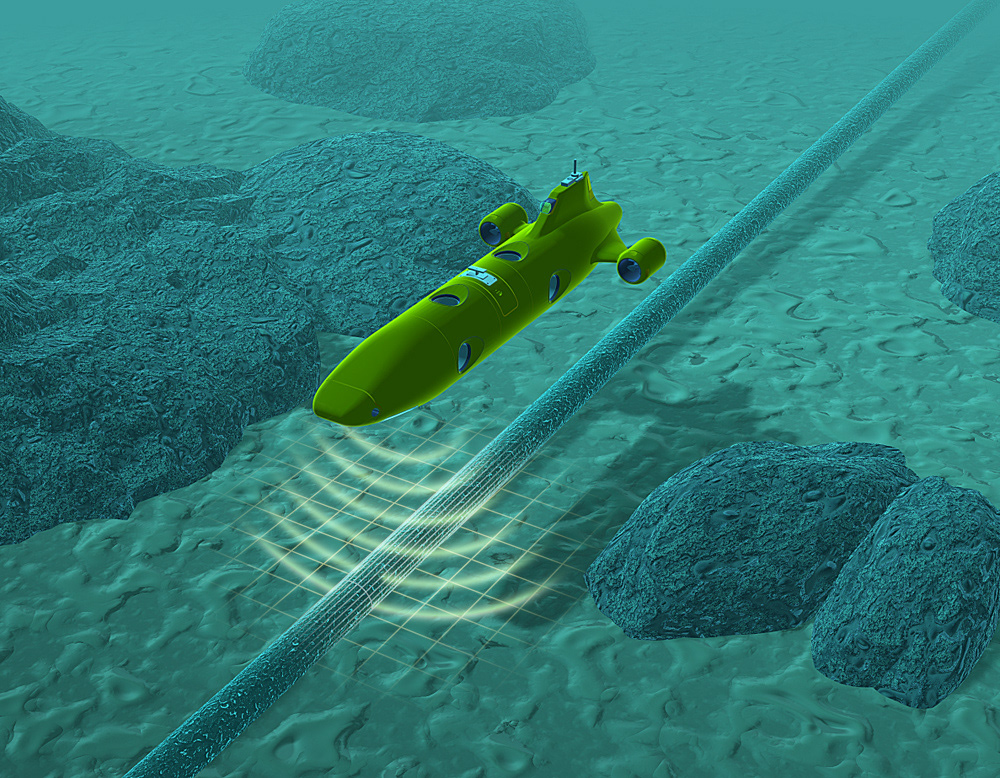
Project for BP to show concepts of an Autonomous Underwater Vehicle. This robotic underwater drone is designed to inspect crude oil piplelines on the ocean floor. An inspection could take several days or weeks as miles of pipelines and equipment are inspected. The AUT would use sonar and other sensors to follow mapped terrain of the seafloor and previously mapped equipment locations. Data collected would be compared to stored 3D maps of the same pipeline and compared in order to detect damaged structures. If damage is detected the AUT uses underwater cameras to visually inspect and record areas of interest. At the end of its inspection mission, the AUT surfaces and is picked up by ship.